Next: Versuchsanleitung
Up: Grundlagen
Previous: Reduktion der Beobachtungen
Contents
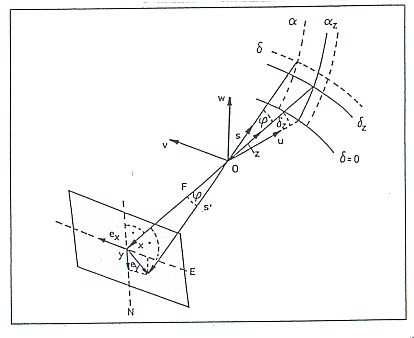
Häufig ergibt sich die Aufgabe, auf einer Photoplatte den Ort eines Sterns
relativ zu anderen Sternen mit bekannten Koordinaten zu bestimmen. Dabei
besteht die Schwierigkeit, daß durch die photographische Aufnahme ein
Ausschnitt der Himmelskugel mittels der gnomonischen Projektion in
die Ebene der Photoplatte abgebildet wird [4].
Das Projektionszentrum  bildet dabei das Objektiv, in dessen Mitte
auf der optischen Achse auch der Ursprung des Koordinatensystems (
bildet dabei das Objektiv, in dessen Mitte
auf der optischen Achse auch der Ursprung des Koordinatensystems ( )
liegt. Die Beziehungen zwischen den sphärischen
Koordinaten
)
liegt. Die Beziehungen zwischen den sphärischen
Koordinaten  und
und  und den (idealen) ebenen Koordinaten
und den (idealen) ebenen Koordinaten  und
und  (Tangential- oder Standardkoordinaten) eines Sterns in der
Abbildungsebene sind in Abb. 3 dargestellt.
Darin zeigen die Vektoren
(Tangential- oder Standardkoordinaten) eines Sterns in der
Abbildungsebene sind in Abb. 3 dargestellt.
Darin zeigen die Vektoren  bzw.
bzw.  auf
den Sternort (
auf
den Sternort (
 ) an der Himmelskugel bzw. seinen Bildpunkt
auf der Photoplatte,
sowie
) an der Himmelskugel bzw. seinen Bildpunkt
auf der Photoplatte,
sowie  und
und  auf das Zentrum des abgebildeten Himmelsausschnittes
mit den Koordinaten (
auf das Zentrum des abgebildeten Himmelsausschnittes
mit den Koordinaten (
 ) und seinen Bildpunkt.
Die
Vektoren und markieren die optische Achse des
Aufnahmeinstrumentes, wobei der Betrag des Vektors die
Brennweite des Instrumentes ist.
In dem Koordinatensystem () ergibt sich der Einheitsvektor ,
der in die Richtung eines Himmelsobjekts mit der Rektaszension und
der Deklination zeigt, zu:
) und seinen Bildpunkt.
Die
Vektoren und markieren die optische Achse des
Aufnahmeinstrumentes, wobei der Betrag des Vektors die
Brennweite des Instrumentes ist.
In dem Koordinatensystem () ergibt sich der Einheitsvektor ,
der in die Richtung eines Himmelsobjekts mit der Rektaszension und
der Deklination zeigt, zu:
 |
(33) |
Analog gilt für den Einheitsvektor z, der in Richtung (
 ), dem Ort am Himmel, auf den die optische Achse des Fernrohrs
ausgerichtet ist, zeigt:
), dem Ort am Himmel, auf den die optische Achse des Fernrohrs
ausgerichtet ist, zeigt:
 |
(34) |
In der Ebene der Photoplatte spannen die Einheitsvektoren
 und
und

 |
(35) |
das Koordinatensystem der Standardkoordinaten
 , der
Bildpunkte der
Himmelsobjekte
, der
Bildpunkte der
Himmelsobjekte
 , auf.
Die Transformationsgleichungen zwischen den sphärischen Koordinaten
, auf.
Die Transformationsgleichungen zwischen den sphärischen Koordinaten
 , siehe Abb. 3, und den Standardkoordinaten
, siehe Abb. 3, und den Standardkoordinaten  in
der Ebene der Photoplatte erhält man durch komponentenweises Aufschreiben
der Bestimmungsgleichung für den Vektor :
in
der Ebene der Photoplatte erhält man durch komponentenweises Aufschreiben
der Bestimmungsgleichung für den Vektor :
 |
(36) |
Das Auflösen dieses Gleichungssystems nach den sphärischen Koordinaten
führt auf:
Die Umkehrtransformation zur Berechnung der
Standardkoordinaten aus den
Himmelskoordinaten ergibt sich zu:
Die Koordinaten unbekannter Objekte lassen sich mittels Photoplatte dann
bestimmen, wenn eine genügende Anzahl von Referenzsternen mit bekannten
Koordinaten gleichzeitig mit abgebildet ist (SAO Sterne). Die
gemessenen realen rechtwinkligen Plattenkoordinaten der Referenzsterne
( ) weichen jedoch im allgemeinen von den Standardkoordinaten
(
) weichen jedoch im allgemeinen von den Standardkoordinaten
( ) ab. Ursachen können u.a. sein: unterschiedliche Nullpunkte beider
Systeme, unterschiedliche Orientierung der Achsen, keine ideale
Rechtwinkligkeit zwischen x- und y-Achse. Maßstabsfehler und eine
Plattenneigung gegen die optische Achse bei der Aufnahme. Zur Elimination
der genannten Einflüsse macht man einen Potenzreihenansatz und bricht diesen
nach dem linearen Glied ab. Das Ergebnis ist ein lineares
Gleichungssystem, das über die sechs Plattenkonstanten A, B, C, D, E, F
die Beziehung zwischen gemessenen Koordinaten und Standardkoordinaten
herstellt:
) ab. Ursachen können u.a. sein: unterschiedliche Nullpunkte beider
Systeme, unterschiedliche Orientierung der Achsen, keine ideale
Rechtwinkligkeit zwischen x- und y-Achse. Maßstabsfehler und eine
Plattenneigung gegen die optische Achse bei der Aufnahme. Zur Elimination
der genannten Einflüsse macht man einen Potenzreihenansatz und bricht diesen
nach dem linearen Glied ab. Das Ergebnis ist ein lineares
Gleichungssystem, das über die sechs Plattenkonstanten A, B, C, D, E, F
die Beziehung zwischen gemessenen Koordinaten und Standardkoordinaten
herstellt:
Zur Bestimmung der sechs Plattenkonstanten A, B, C, D, E, F benötigt man
(mindestens) drei Referenzsterne mit bekannten Koordinaten (
 ), i = 1, 2, 3, deren rechtwinklige Koordinaten (
), i = 1, 2, 3, deren rechtwinklige Koordinaten (
 )
zusammen mit denen des zu vermessenden Gestirns, () auf der Platte
ermittelt werden. Daraus ergeben sich zwei Gleichungssysteme mit jeweils
drei Gleichungen für die sechs Unbekannten A, B, C, D, E, F:
)
zusammen mit denen des zu vermessenden Gestirns, () auf der Platte
ermittelt werden. Daraus ergeben sich zwei Gleichungssysteme mit jeweils
drei Gleichungen für die sechs Unbekannten A, B, C, D, E, F:
Die Standardkoordinaten (X, Y) des Kleinen Planeten
erhält man
anschließend durch das Einsetzen der Meßwerte () in die Gleichungen
(39), nachdem die Plattenkonstanten bekannt sind. Die Himmelskoordinaten
(
 ) ergeben sich durch Einsetzen in die
Transformationsgleichung (37).
Da die Messung der Sternkoordinaten aber nie völlig fehlerfrei sein wird,
ist es besser, möglichst viele Referenzsterne (mindestens 6) zu vermessen
und das Gleichungssystem mittels Ausgleichsrechnung zu lösen. Auf diese
Weise erhält man auch eine Abschätzung für den Meßfehler und kann falsch
identifizierte Sterne durch Weglassen jeweils eines Referenzsternes
herausfinden.
) ergeben sich durch Einsetzen in die
Transformationsgleichung (37).
Da die Messung der Sternkoordinaten aber nie völlig fehlerfrei sein wird,
ist es besser, möglichst viele Referenzsterne (mindestens 6) zu vermessen
und das Gleichungssystem mittels Ausgleichsrechnung zu lösen. Auf diese
Weise erhält man auch eine Abschätzung für den Meßfehler und kann falsch
identifizierte Sterne durch Weglassen jeweils eines Referenzsternes
herausfinden.
Next: Versuchsanleitung
Up: Grundlagen
Previous: Reduktion der Beobachtungen
Contents
Juergen Weiprecht
2002-10-29