Next: Bildverarbeitungssysteme
Up: Gewinnung von räumlich aufgelösten
Previous: Rauschen der Signalanteile
Contents
16.3.4 Erstellung von Polarisationskarten
Die Zusammenführung der für eine Polarisationskarte notwendigen vier
verschiedenen CCD-Bilder bedarf einer Reihe weiterer Auswerteschritte, die im
folgenden beschrieben werden.
Bei Verwendung mehrerer Aufnahmen, die bei verschiedenen Analysatorstellungen
von ein und demselben Himmelsausschnitt gewonnen wurden,
ist noch eine Zentrierung der
Bilder mittels einzeln stehender heller Referenzsterne erforderlich.
Da die Polarisationskarte gegenüber Verschiebung der Einzelaufnahmen sehr
empfindlich ist, muß die Zentrierung mit großer Genauigkeit (0,1 Pixel,
[12]) erfolgen (in Gebieten hoher Intensitätsgradienten würden
Verschiebungen um ganze Zeilen oder Spalten zu großen Fehlern führen).
Anstatt einer pixelweisen Verschiebung ist eine kontinuierliche
Verschiebung nach Koordinaten erforderlich. Dies wird durch die Anpassung
eines Intensitätsverlaufes an die diskreten Pixelwerte ermöglicht.
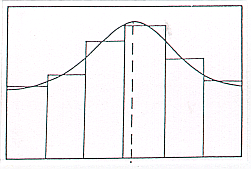
Das Licht der Sterne erzeugt in einer Abbildung keinen Punkt,
sondern ein Beugungsscheibchen. Der Intensitätsverlauf entspricht dabei einer
GAUSSschen Glockenkurve.
Die Lage der Maxima der Glockenkurven verschiedener Sterne ermöglicht die
Feststellung einer relativen Koordinatenverschiebung
(vgl. Abb. 12).
Sind die einzelnen Bilder nicht nur zueinander verschoben,
sondern auch leicht verdreht, sowie in der Größe verschieden und verzerrt,
so können
zwei Bilder mit den Koordinatensystemen  und
und  durch eine lineare Transformation mit sechs Parametern (
durch eine lineare Transformation mit sechs Parametern ( ,
,  ,
,
 ,
,  ,
,  und
und  ) zueinander zentriert werden
(
) zueinander zentriert werden
(  ) [20].
Diese Transformation basiert auf dem Operator
) [20].
Diese Transformation basiert auf dem Operator  ,
der die Rotation
des Koordinatensystems 1 engegen dem Uhrzeigersinn um den Winkel
,
der die Rotation
des Koordinatensystems 1 engegen dem Uhrzeigersinn um den Winkel  ins Koordinatensystem 2
realisiert und dem Operator
ins Koordinatensystem 2
realisiert und dem Operator  ,
der mit den
Werten von
,
der mit den
Werten von
 die Verschiebung und den Faktoren
die Verschiebung und den Faktoren
 die Stauchung oder Streckung der Koordinatenachsen
bewirkt:
die Stauchung oder Streckung der Koordinatenachsen
bewirkt:
Da die verschiedenen zur Bestimmung des Polarisationszustandes notwendigen
Aufnahmen nacheinander und somit nicht unter identischen Bedingungen
(verschiedene Belichtungszeiten, verschiedene atmosphärische Extinktionen,
...)
erstellt wurden, müssen sie noch relativ zueinander kalibriert (angeglichen)
werden. Beim Zweistrahlpolarimeter müssen außerdem noch die beiden Kanäle
zueinander
kalibriert werden. Für die Kalibration werden mit Hilfe von auf der
Aufnahme sichtbaren Referenzsternen Wichtungsfaktoren
bestimmt.
Hat ein Stern auf vier verschiedenen Aufnahmen (Polarimeter mit
Polarisationsfolie) die Intensitäten  ,
,
 ,
,
 und
und
 ,
so ermitteln sich die Wichtungsfaktoren (
,
so ermitteln sich die Wichtungsfaktoren ( ,
,
 ,
,
 und
und
 ) einfach aus dem Vergleich der
Sternintensitäten in den verschiedenen Bildern (siehe auch [20]):
) einfach aus dem Vergleich der
Sternintensitäten in den verschiedenen Bildern (siehe auch [20]):
 |
|
|
(9) |
Sterne, die für die Bestimmung der Intensitäten ausgewählt werden, dürfen
nur in Gebieten liegen, die frei von der polarisierten
Strahlung des interessierenden Objektes sind. Bei der Kalibration wird
neben der Angleichung der Einzelaufnahmen bezüglich der Intensität
gleichzeitig der Einfluß der interstellaren Polarisation beseitigt.
Zu beachten
ist dabei, daß bei der Auswahl eines auf der gleichen Aufnahme befindlichen
Referenzsternes die Entfernung in etwa der des
interessierenden Objektes entspricht, da die interstellare Polarisation
entfernungsabhängig ist.
Der letzte Auswerteschritt beinhaltet die eigentliche Erstellung der
Polarisationskarte. Dazu werden zunächst die STOKES-Parameter berechnet.
Die dafür in den Gleichungen (2) gegebenen Beziehungen können nicht
ohne weiteres übernommen werden, da die Konvention für die Winkelmessung im
Beobachtersystem N, O von der im bisher zugrunde gelegten Koordinatensystem
 abweicht (siehe Abb. 13).
Für die Berechnung der STOKES-Parameter gilt:
abweicht (siehe Abb. 13).
Für die Berechnung der STOKES-Parameter gilt:
Bevor der Grad der linearen Polarisation  und der Winkel
ihrer Orientierung bezüglich der Nord-Süd-Richtung nach den Gleichungen
(6) und (7) bestimmt werden, können die STOKES-Parameter
und der Winkel
ihrer Orientierung bezüglich der Nord-Süd-Richtung nach den Gleichungen
(6) und (7) bestimmt werden, können die STOKES-Parameter
 ,
,  ,
,  zur Reduzierung des Rauschens über einige Pixel zusammengefaßt
werden (hier macht sich die Eigenschaft der Additivität der STOKES-Parameter
positiv bemerkbar), was jedoch einen Verlust an Auflösung mit sich bringt.
zur Reduzierung des Rauschens über einige Pixel zusammengefaßt
werden (hier macht sich die Eigenschaft der Additivität der STOKES-Parameter
positiv bemerkbar), was jedoch einen Verlust an Auflösung mit sich bringt.
Die Null-Richtung der Polarisation am Himmel (N-S-Richtung)
kann mit Hilfe eines Standardobjekts bestimmt werden.
Zur Visualisierung der räumlich aufgelösten Ergebnisse von und
wird die sogenannte Polarisationskarte erstellt. Diese enthält
Bildelemente, die in ihrer Größe die räumliche Auflösung festlegen.
Ins Zentrum eines jeden Bildelementes wird ein sogenannter Polarisationsvektor
eingetragen, dessen Länge den Betrag () und dessen Lage die
Richtung () der linearen Polarisation kennzeichnen. Einige solcher
Karten sind in den Kapiteln 16.2.2 und 16.4 abgebildet.
Statistisch verteilte Polarisationsvektoren außerhalb der
Emissionsgebiete lassen sich in der Polarisationskarte unterdrücken,
indem ihre Darstellung erst oberhalb eines bestimmten Intensitätswertes
erfolgt. Eine weitere Verbesserung der Ergebnisse bringt der Vergleich der
Pixelwerte , , der verschiedenen Aufnahmen mit einer lokalen
Näherungsfunktion, in dessen Resultat eine Aussage zur "`Datengültigkeit"'
(englisch: data validation) steht. Sind einzelne Pixelwerte außerhalb des
lokalen Trends, so werden sie durch einen ihrer Umgebung angepaßten
Interpolationswert ersetzt (siehe [20]).
Next: Bildverarbeitungssysteme
Up: Gewinnung von räumlich aufgelösten
Previous: Rauschen der Signalanteile
Contents
Juergen Weiprecht
2002-10-29